MAC-VO: Metrics-Aware Covariance for Learning-based Stereo Visual Odometry
ICRA 2025 Best Paper Award on Robot Perception
*Equal Contribution
1Carnegie Mellon University
2Shanghai Jiao Tong University
Abstract
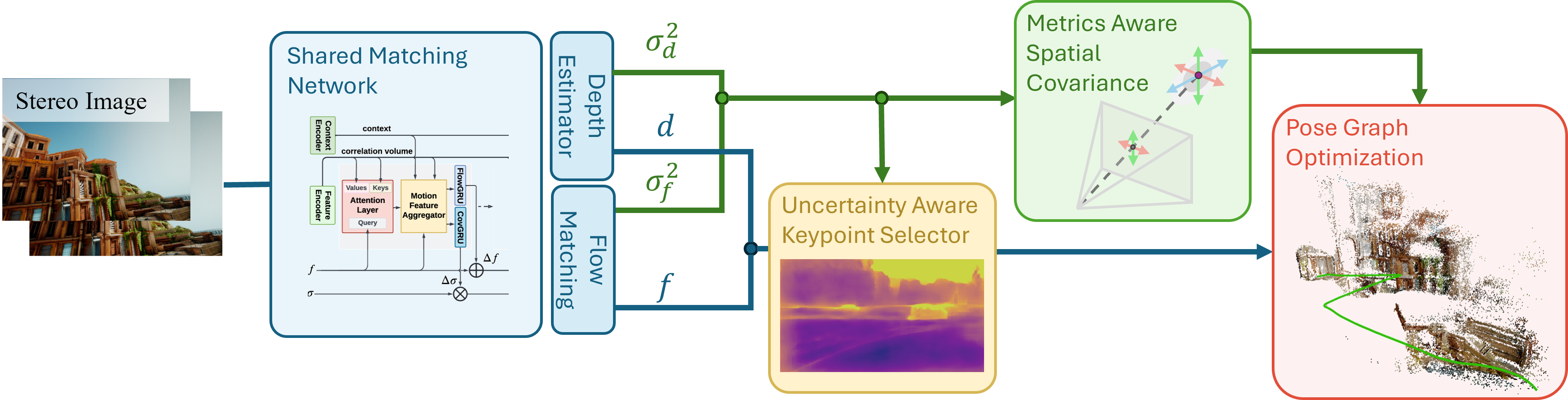
We propose MAC-VO, a novel learning-based stereo VO that leverages the learned metrics-aware matching uncertainty for dual purposes: selecting keypoint and weighing the residual in pose graph optimization. Compared to traditional geometric methods prioritizing texture-affluent features like edges, our keypoint selector employs the learned uncertainty to filter out the low-quality features based on global inconsistency. In contrast to the learning-based algorithms that rely on the scale-agnostic weight matrix, we design a metrics-aware spatial covariance model to capture the spatial information during keypoint registration. Integrating this covariance model into pose graph optimization enhances the robustness and reliability of pose estimation, particularly in challenging environments with varying illumination, feature density, and motion patterns. On public benchmark datasets, MAC-VO outperforms existing VO algorithms, even some SLAM algorithms in challenging environments. The covariance-aware framework also provides valuable information about the reliability of the estimated poses, which can benefit decision-making for autonomous systems.
MAC-VO at ICRA 2025
ICRA Registration Lobby
Main Floor Dynamic Scene
Presentation Room


MAC-VO Dense Mapping
By incorporating our uncertainty estimates, we can reliably select feature points for dense mapping without bundle adjustment / multi-frame optimization. The video below shows the dense mapping result on EuRoC, VBR, TartanAir, and TartanAir v2. No post-processing is applied.
Zed X Fire Academy 2
Zed X Fire Academy 1
AirLab Office
AirLab Workbench
Methods
System Pipeline
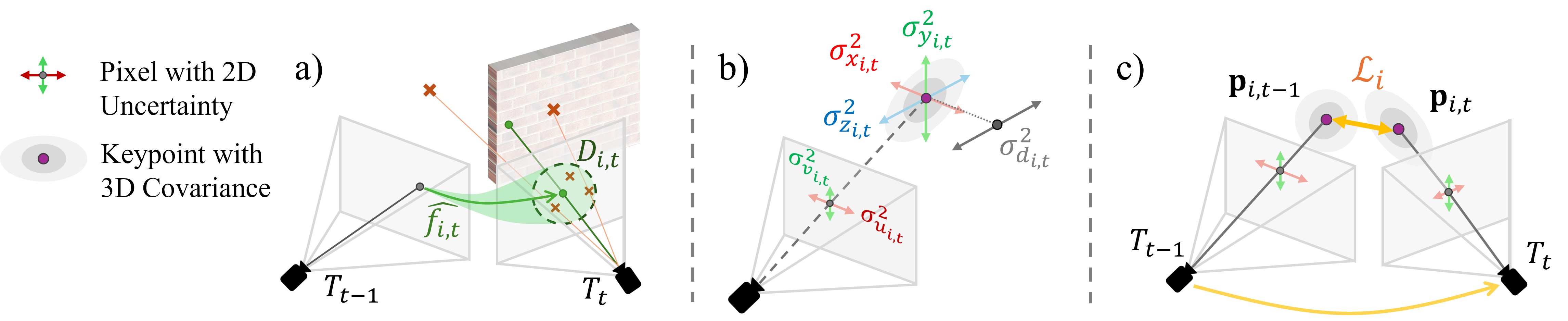
Metrics-Aware Spatial Covariance
Citation
@inproceedings{qiu2025mac,
title={MAC-VO: Metrics-Aware Covariance for Learning-Based Stereo Visual Odometry},
author={Qiu, Yuheng and Chen, Yutian and Zhang, Zihao and Wang, Wenshan and Scherer, Sebastian},
booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},
pages={3803--3814},
year={2025},
organization={IEEE}
}